Problem: |
|
 |
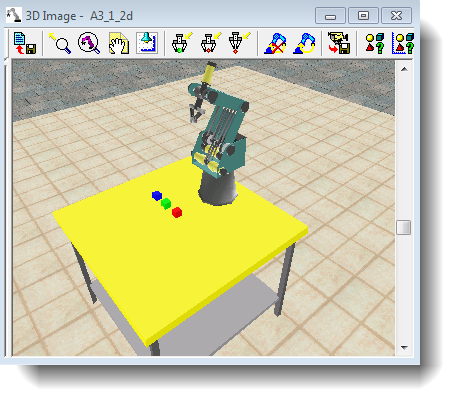
I get an error that Reads: “blah blah blah… impact occurred and I know the X Y and Z values are right, and that they are in the work envelope. What’s wrong? |
Solution:
|
|
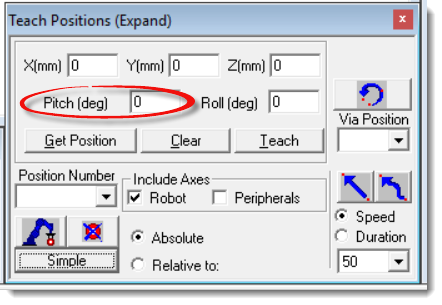 |
Probably what has happened is that the pitch was left at 0 degrees. This will cause the gripper to try and rotate up from perpendicular to the table, causing the motor for the gripper to crash into the robot. The pitch of the gripper has to be -90 in order to be perpendicular to the table. |
999 total views, 4 views today