Robotics Lynxmotion Projects

Project Idea: Dual Lynx To Vex Handshaking Modules
Sorry it took so long, but here is some info on how to make the Dual Handshake Module Jim & I designed two years ago. All files are attached in a zip file at the link below. These files include: All inventor part files: tweak to your heart’s content STL and Makerbot files DXF files […]
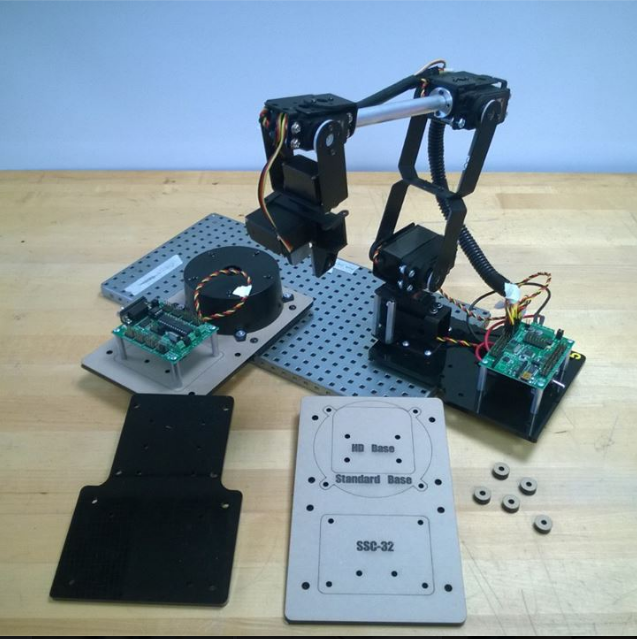
WHAT KIND OF ACCESSORIES CAN I MAKE FOR MY LYNXMOTION ROBOTIC ARM?
Question: What kind of accessories can I make for my Lynxmotion Robotic Arm? Solution: With a few tools and some ingenuity you can make some pretty cool accessories to make your Lynxmotion robot way cool. I have to admit, having a laser really helps! Click on the picture to get many ideas, some complete […]
Example Factories
Question: Do you have any sample factories I can show my students to get them excited? Solution: Sure do…. see the links below! Be sure to send us any that you and your students do… we would love to feature them here! [youtube_sc url=”https://youtu.be/ee0ut-RfTgU” width=”800″] CalPoly’s 2015 Factory that Assembles the lid to a container […]
