Robotics Dobot Teach & Playback Lessons
0.5 Presentation-Introduction to Robotics
This is a presentation that can be used as the perfect introduction into the types of robots used in industry today and how it is applied with your classroom robot. Video coming soon
01 T&P Robot Axis & Movement
Download Activity Download Blank Field Template Jointed arm robots are useful for many different tasks because of its range of motion and degrees of freedom. In this activity you will learn how to move a robotic arm in many different ways and write a program to make the robot write the word “CIM” with accuracy […]

02 T&P Robot Pick & Place
Download Robotic arms are excellent for performing pick and place operations such as placing small electronic components on circuit boards, as well as large boxes on pallets. A pick and place operation will require at least 5 points: ● Home ● Above the pick point ● At the pick point ● Above the pick point […]
02.5 T&P Presentation-Robot Applications
Download This presentation introduces the concepts of how robots are used in industry. From Pick and place operations to MIG and TIG welding and everything in between.

03 T&P Using Jumps & Loops
Download A pick and place style of moving objects around are staples of industrial robots. Another reason to use robots in industry and automation is because of danger to humans. Robots can work in adverse environments that are dangerous to humans; especially when dealing with chemicals and other toxic substances. Sometimes the best way to […]

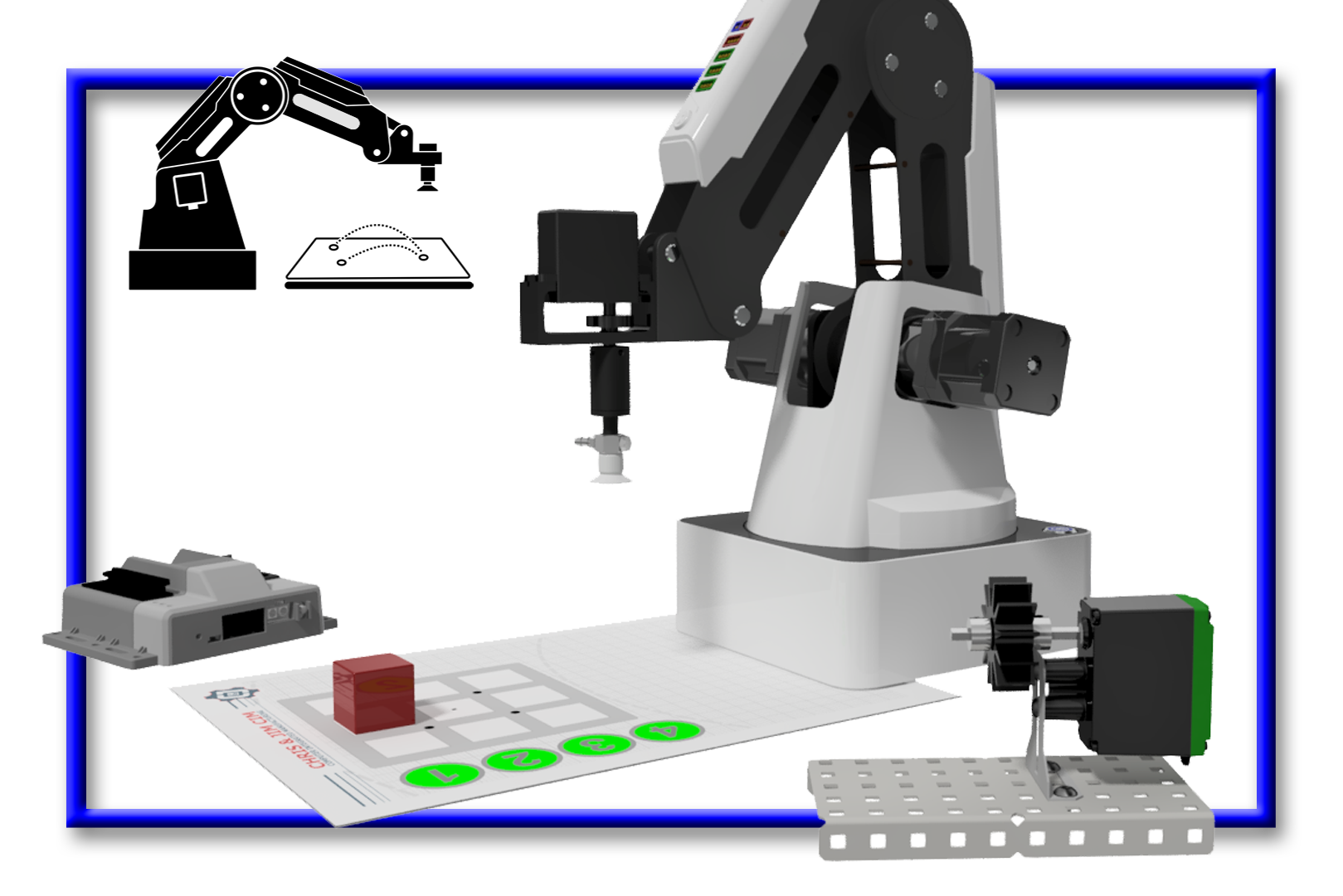
04 T&P Using Digital Inputs
Download Robotic arms need to be able to communicate with an operator so that you can tell it when to begin or end an operation. We can do this very easily with an input connected to the arm. This input can be something as simple as digital on/off switch. In this activity, you will perform […]
04.5 T&P Presentation-Robotic Communication
Download This presentation covers the inputs and outputs of the Dobot Magician as well as the communication technique called Handshaking. This is very simple form of communication with 1’s and 0’s. Includes the use of relays and Optical Isolators. Examples are also given for robot to robot, robot to micro controller, and micro-controller to micro-controller […]

05 T&P Palletizing & Roll Angles
Download Have you ever wondered why most consumer goods are delivered to your doorstep in rectangular boxes? Think about the shape of the truck they were delivered in. Or the shape of the boxcar or shipping container that they left the factory in. Most consumer goods are moved around on pallets that are rectangular as […]

06 T&P Handshaking-Dobot To Dobot
Download Robotic arms need to communicate with other robots in a work cell, or factory. This is called HANDSHAKING and can be done between different machines, devices and robots. It is a very simple form of communication and is done with simple ones and zeros; or “ons” and “offs”. In this activity you will learn […]
07 T&P Handshaking-Dobot to Microcontroller
Download Robotic arms sometimes need to communicate with other machines in a workcell, or factory. This is called HANDSHAKING and can be done between different machines, devices and robots. It is a very simple form of communication and is done with simple ones and zeros; or “ons” and “offs”. In this activity you will learn […]
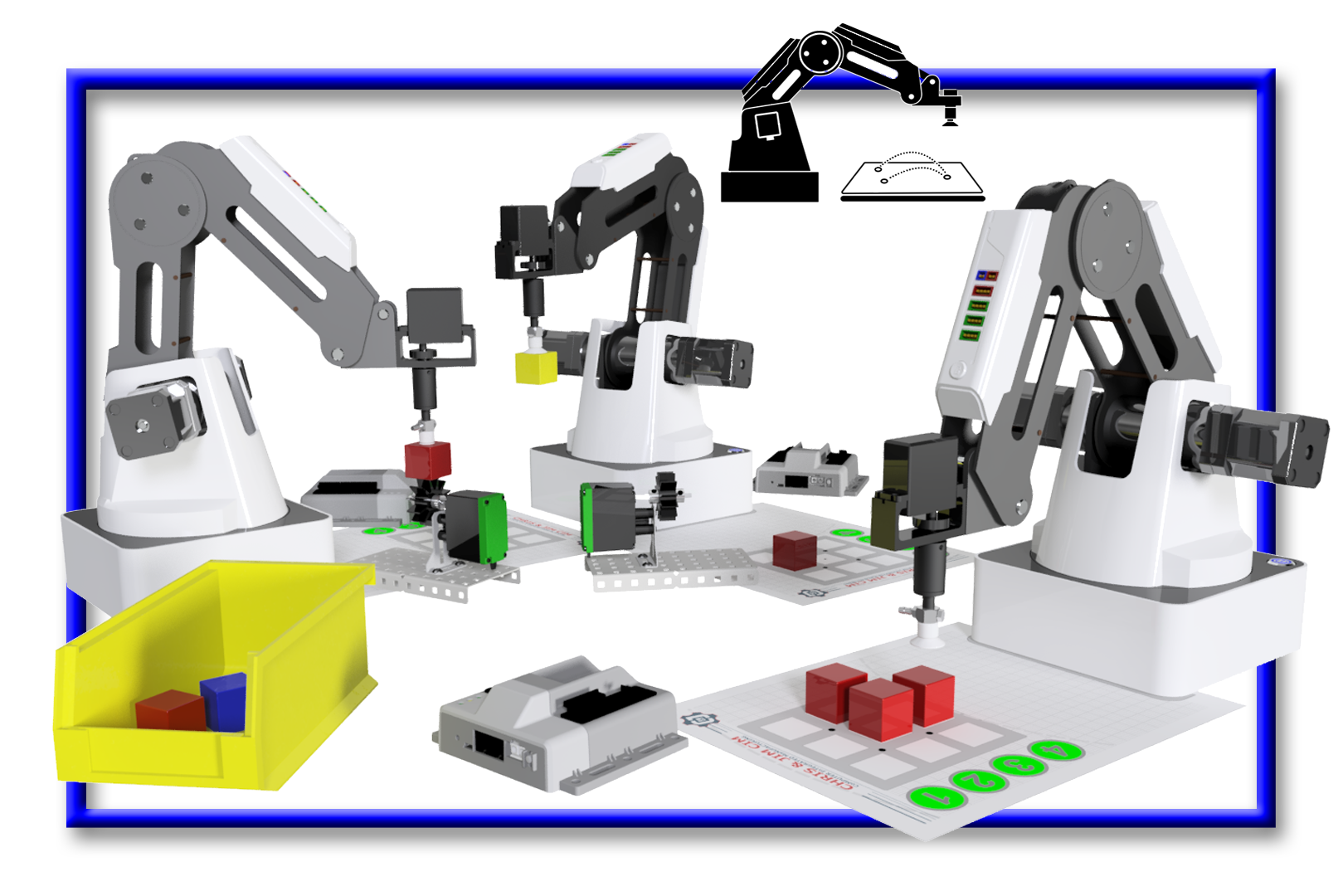
08 T&P Workcell Design
Download A robotic workcell is defined as the complete environment around a robot. This environment may include tools, machines and/or other robots. An example of an assembly operation using robots and VEX components In this activity you will use a robot and a microcontroller system to recreate a workcell. Your workcell will incorporate all of […]

09 T&P Robotics Glossary
Download Do you want a list of key vocabulary words for your students? Alphabetized and listed as to which activity they can be found in? This is your download then!

12 Input-Output Guide
Download The Input/Output Guide was put together by Jim and I and tested extensively to make sure that inputs and outputs worked smoothly and were well documented. The first page outlines how peripherals are attached to the Dobot, and the second page is the Digital Signal guide that shows you how to test inputs and […]
13 Field Template
Download Consider the Field Template the “Playground” for your Dobot Magician! Place the robot’s base on the edge of the paper where it is outlined, and use the pallet to palletize, pick and place, or stack objects. There are also some “dip tanks off to the side to do dipping operations. This template can be […]

Dobot Activity 1: Robot Axis & Movement
Download Dobot Activity 1: Robot Axis and Movement Download Complete Workbook
Dobot Activity 2- Pick and Place
Download Dobot Activity 2: Pick and Place Download Complete Workbook
Dobot Activity 3-Jumps And Loops
Download Dobot Activity 3: Jumps & Loops Download Complete Workbook
Dobot Activity 4 - Using Digital Inputs
Download Dobot Activity 4: Using Digital Inputs Download Complete Workbook
Dobot Activity 5 - Palletizing & Roll Angles
Download Dobot Activity 5: Palletizing & Roll Angles Download Complete Workbook
Dobot Activity 6: Handshaking - Dobot to Dobot
Download Dobot Activity 6: Handshaking – Dobot to Dobot Download Complete Workbook
