07 T&P Handshaking-Dobot to Microcontroller
 Download
Download
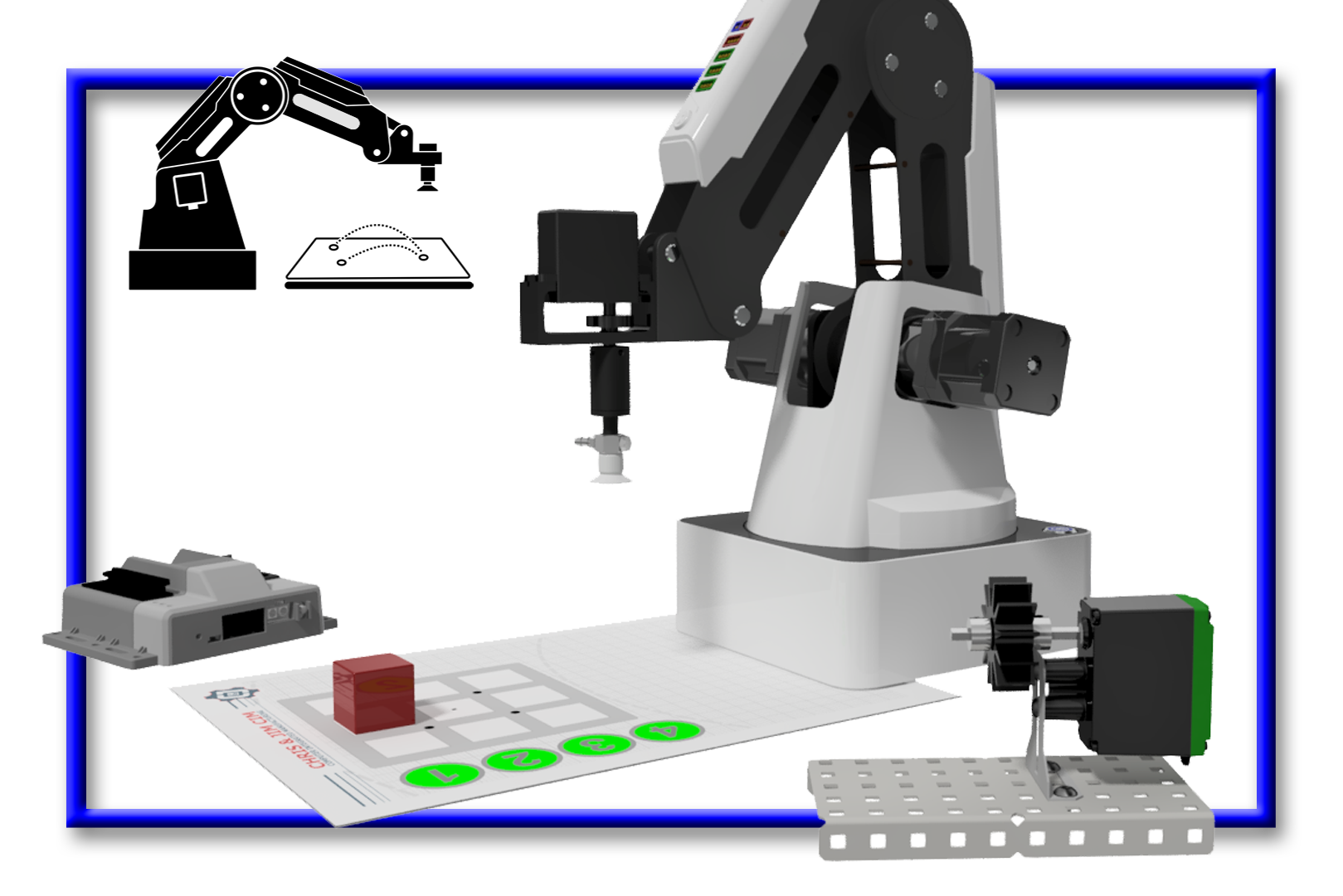
Robotic arms sometimes need to communicate with other machines in a workcell, or factory. This is called HANDSHAKING and can be done between different machines, devices and robots. It is a very simple form of communication and is done with simple ones and zeros; or “ons” and “offs”.
In this activity you will learn how to make a robot handshake with a simulated machine; a grinder. You will make the robot talk to the grinder to turn it on during an automated grinding operation. Remember, this is CIM, we do not want to keep the grinder running all the time; we need to conserve energy, time, and resources, so the grinder needs to stop, and the robot will then replace the part.
 Video Coming Soon…
Video Coming Soon…

![]()
Dobot Teach & Playback Lessons
















Chris and Jim CIM
© Copyright 2020
Developed by phan1221
