Dipping with the Dobot Magician

Pick and place and moving things around are staples of industrial robots. Another reason to use robots in industry and automation is because of danger to humans. Robots can work in environments that are adverse to humans; especially toxic and/or adverse environments.
Sometimes the best way to pick up an object is with a suction cup or vacuum gripper. This works especially well with very small objects as well as large, and provides a cheaper alternative to a mechanical gripper.
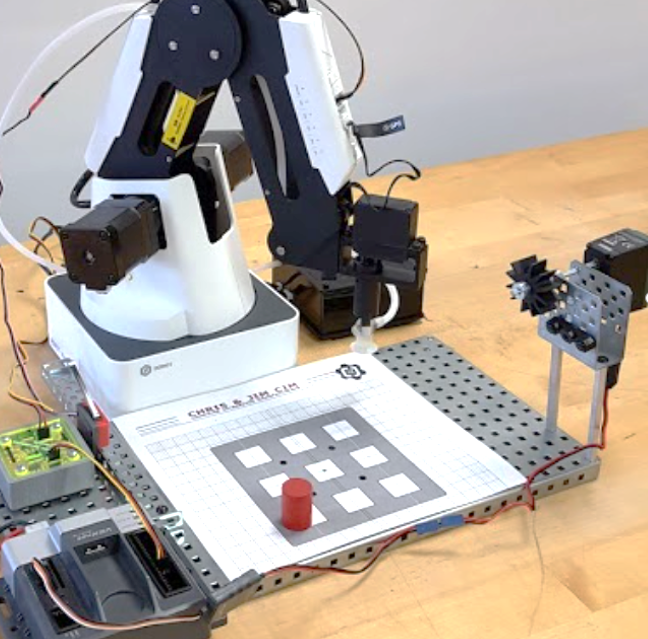
In this activity, you will perform a chemical dipping operation with a robot arm using the air pump kit and a vacuum gripper.
- Go home
- Pick up the cylinder from the pallet
- Dip it in Tank 1 for 2 seconds
- Move the object and dip it in Tank 2 for 2 seconds
- Move the object and dip it in Tank 3 for 2 seconds
- Move the part back to the pallet.
2,638 total views, 1 views today