What vocabulary is necessary to be successful in CIM, wether as a student or teacher; in the classroom or at CTI?
Solution:
Great question, as many studies have shown that a strength in vocabulary leads to success in ALL areas, and this includes CIM and manufacturing education.
![]() Click HERE to get the list as a PDf download.
Click HERE to get the list as a PDf download.
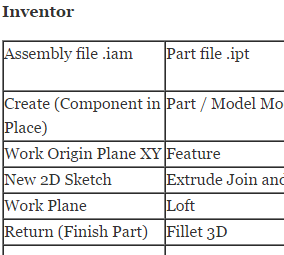
Below is a list to get started.
Inventor
| Assembly file .iam | Part file .ipt | Design 2D Sketch Mode | Finish Sketch |
| Create (Component in Place) | Part / Model Mode | Line | Constraints |
| Work Origin Plane XY | Feature | 2-Point Rectangle | Coincident Constraint |
| New 2D Sketch | Extrude Join and Cut | 3 Point Arc | Equal Constraint |
| Work Plane | Loft | Center Point Circle | Tangent Constraint |
| Return (Finish Part) | Fillet 3D | Construction Line | Slice Graphics |
| Offset (Loop & No Loop) | Derive Part | ||
| Fillet 2D |
EdgeCAM
| Design Mode | Offset | Manufacture Mode | % Step Over |
| Auto Stock | Line | Post | Cut Increment |
| CPL/PRZ | Text | ToolStore | Boundary |
| Create CPL | Transform/Translate | Roughing Operation | Lead Radius |
| Select CPL | Distance / Measure | Speed (Spindle) | Use Current Tool |
| Feature Finder | Feed Rate | Profiling Operation | |
| Boss (Island) | Plunge Feed Rate | Surface Operation | |
| Climb | Hole Operation | ||
| Hole | Conventional | Slot Cycle | |
| Profile Loop (Feature Finder) | Optimized | Parallel Lace | |
| Mill Feature (Feature Finder) | Clearance | Constant Cusp | |
| Hole (Feature Finder) | Depth | Z Level Finishing | |
| Geometry from Loops | Level | Cycle Time | |
| Comparison | |||
| Simulation | |||
CNC
| Preparatory Code (G) | Miscellaneous Code (M) | Speed Rate | Origin / PRZ / CPL |
| G90 Absolute | M02 End Program | Feed Rate | Datum |
| G91 Relative / Incremental | M03 Spindle On (Needs S) | Plunge Rate | Modal |
| G00 Rapid Traverse | M05 Spindle Off | Block | Plunge |
| G01 Straight Line Interpol | M06 Tool Change | Address Character | Retract |
| G02 Cir Interpolation CW | M30 Program End and Reset | Parameter | Safe Position / Clearance |
| G03 Cir Interpolation CCW | M08/M09 Accessory 1 on/off | Word | Jig |
| G04 Dwell (Needs F) | M10/M11 Accessory 2 on/off | X Axis | Fixture |
| G05 Pause | Y Axis | Numerical Control (NC) | |
| G20 Inch Mode | F = Feed Rate or Time | Z Axis | Pneumatic Vise |
| G21 Millimeter Mode | Chip Load / Tool Feed | XY and IJ and R | Machinist Vise |
| Comment | Cutting Speed-Surface ft/min | Ball Screw | Strap and Step Clamp |
| Acme Screw | |||
| Tool Center Point (TCP) | Tool Cutter Compensation | Tool Height Offset |
CNC Motion
| Home | Setup Library | Verify Setting | Operator Control |
| Verify | Setup Tool Wizard | Stock/Vise | Single Step |
| Run / Cycle Start / Simulate | Select Tool | Feed Override | End Mill |
| Pause | Set Position | Speed Override | Ball End Mill |
| Stop | Run Setting | Jog Control | Bull End Mill |
| Estimate Run Time | Arc Centers Incremental | Step Jog | Taper End Mill |
| Jog Control | Go to Position | Continuous Jog | Non-Center Cutting |
| Work Space | Send Tool to Corner | Soft Limits | Center Cutting |
Robot C
| Open Sample Program | Digital Sensor | Natural Language | Compile |
| Pseudo Code | Touch Sensor | Task main | Debugger |
| Pragma | Quadrature Encoder | If-Else Loops | Firmware (Master / RobotC) |
| Motors and Sensors Setup | Sonar / Ultrasonic | While Loops | Platform Type |
| Motor | Analog Sensor | Variables | |
| Motor 269 | Potentiometer | Functions | |
| Motor 393 | Light Sensor / Photo Cell | Void | |
| Flashlight / LED | Line Follower / Infrared | Open and Closed Loop | |
| Motor Controller | LED | Normally Open | |
| Servo | DigitalPort | Normally Closed | |
| MotorPort | Until | Feedback | |
| Motor Backlash | Wait |
RoboCELL
| ER4U | Axis Control | Program Flow | Inputs and Outputs |
| Peripheral | Open Gripper | Wait | If Input |
| Feeder | Close Gripper | Jump | Turn on Output |
| PLM1000 | Go Linear | Remark | Turn off Output |
| Controller Setup | Go Circular | Set Variable to Computation | Joints Movement |
| If Jump | XYZ Movement | ||
| Record Position | Work Envelope | Label | |
| Teach Position | Payload | Follow Me Camera | |
| Roll | Reset Workcell | Servo Motor | Run Single Line |
| Pitch | Dialog Bars | Stepper Motor | |
| Get Position | Home | Encoder | |
| Send Robot to Object | Degrees of Freedom |
Elements of Power
| Ampere | Power | Watt | |
| Electrical Current (I) | Revolutions per Min (RPM) | Work | |
| Force | Servo Motor | ||
| Horsepower (HP) | Stepper Motor | ||
| Hydraulic | Torque | ||
| Joule | Velocity | ||
| Pounds Per Square Inch (PSI) | Viscosity | ||
| Pneumatic | Voltage (V) |
Flowbotics Studio
| Handshaking | Calibration | Joint Movement | |
| End Effector | Work Envelope | AL5D | XYZ Movement |
| Input | Servo Motor | Record | Spare Servo |
| Output | Payload | Pause | Accuracy |
| Optoisolator | Schematic | Copy | Reliability |
| Relay | Loop | Delete | Repeatability |
| Resistor | Step | Global Speed | |
| Breadboard | Sequence | SSC-32 |
Misc
| AGV | ASRS | Automation | CAD |
| CAM | CIM | Dependent Variable | Independent Variable |
| JIT | Kaizen | Six Sigma | Variable |
| Fixed Cost | Value-Added | Non-Value Added (NVA) | Overhead |
| Profit | Raw Material | Variable Cost | Durability |
| Design Flaw | Quality Control | Ethics / Morality | Defective |
| FDM | Stereolithography | Laser Sintering | 3D Printing |
| LOM | Prototype | Subtractive Process | Additive Process |
| Post Processing | Build Time | Exhaustible Resource | Renewable Resource |
| Inventory Control | PLC | Microcontroller | FMS |
| Process Design Chart | Workcell | ||
| Flow Process Chart | |||
| Operation | Delay | Transportation | Storage |
| Inspection |