How do I Handshake Between a VEX Cortex and a Lynxmotion Robot Arm?
Question:
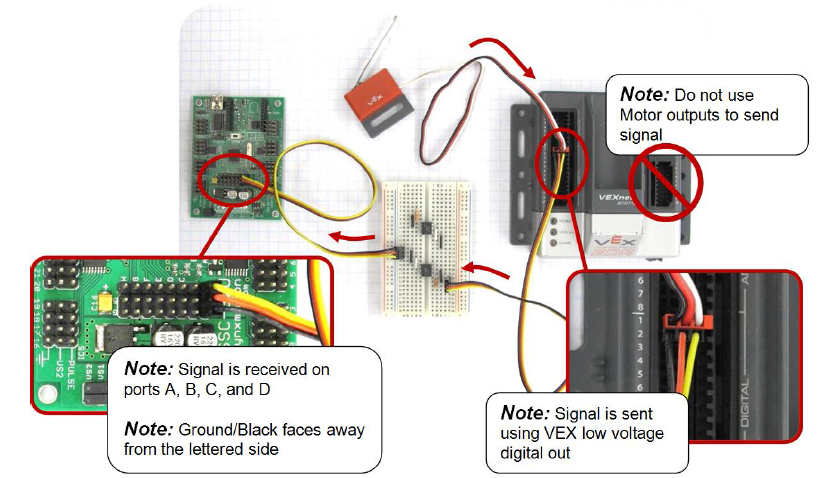
I have a lynxmotion robot, and I want to make it talk to a machine connected to a VEX Cortex using inputs and outputs. How do I do this?
Answer:
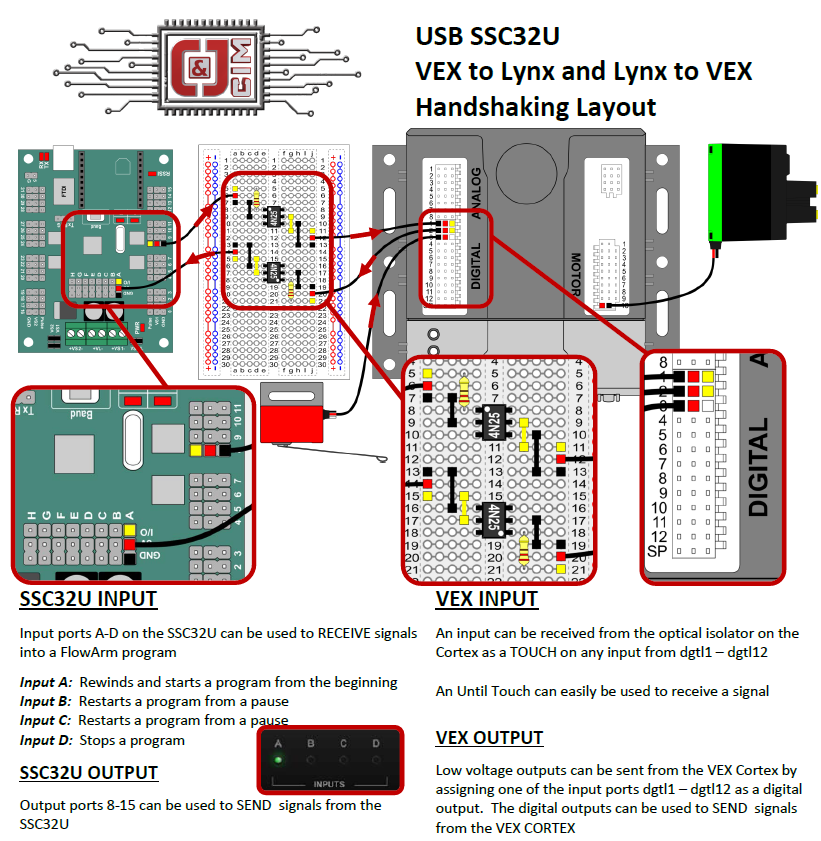
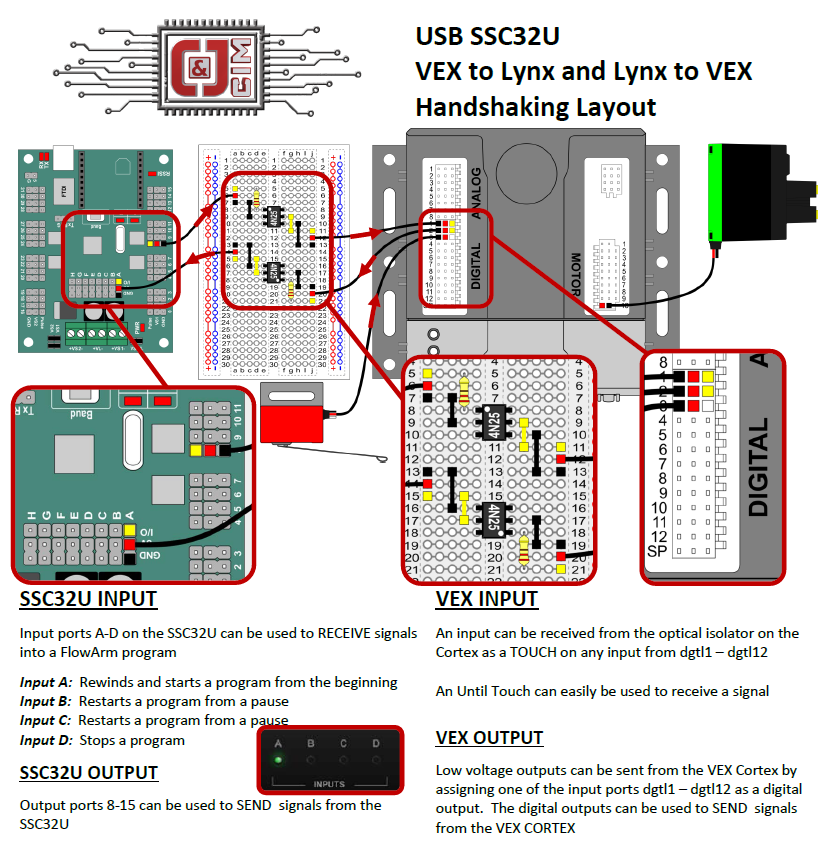
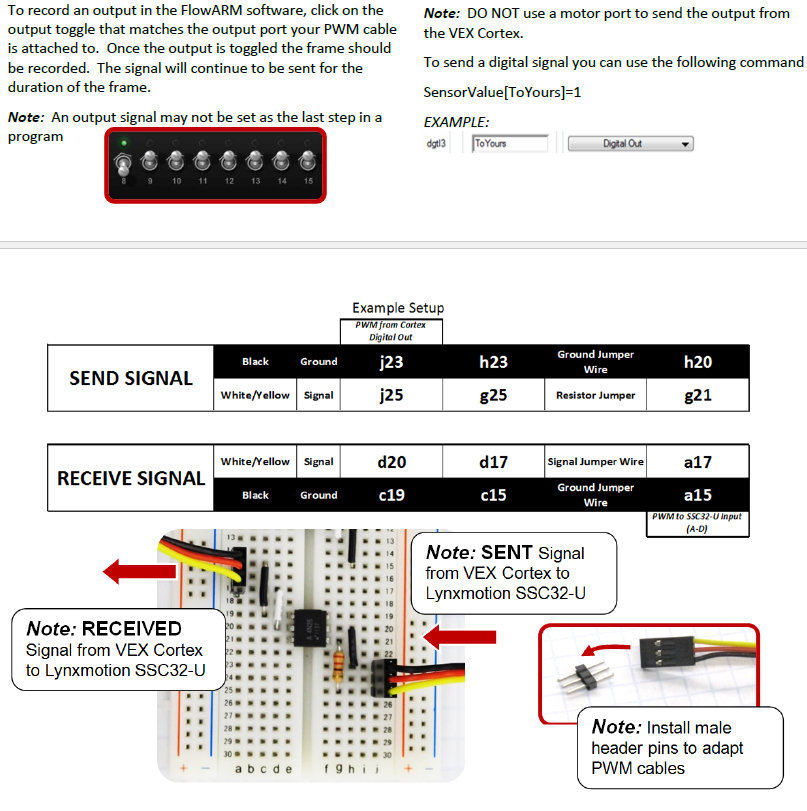
This is called handshaking, and you will need at least one computer, Flowarm and RobotC Software, a Lynx arm with SSC32 controller, and a VEX cortex to do this.
Below is a worksheet that you can download with all of the basics, and there will be a video below shortly as well.
![]()