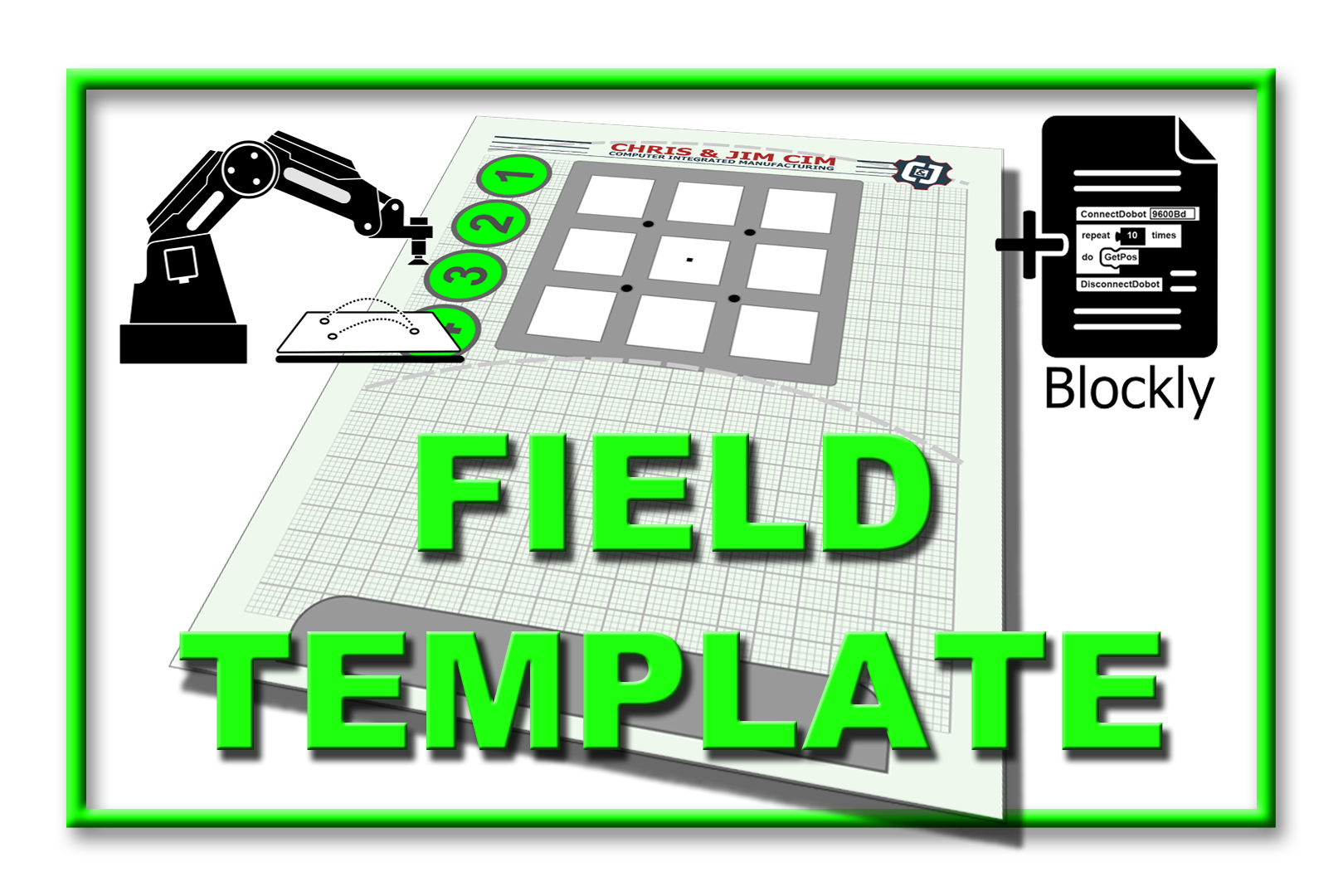
13 Field Template
Download
Consider the Field Template the “Playground” for your Dobot Magician! Place the robot’s base on the edge of the paper where it is outlined, and use the pallet to palletize, pick and place, or stack objects. There are also some “dip tanks off to the side to do...