The Dobot Magician: A REAL Educational Robot?


About a month ago I purchased a Dobot Magician from an Etsy shop, as that was the only way to get them at the time. Try telling your business office you want to use school money to buy something on Etsy…. Luckily, it was a grant, and I was able to purchase it. It is now available at In-Position Technologies here for $1499.00. Personally, I see the Laser and the the 3D printer head as novelty items, but I really want to focus on the accuracy, and the ability to teach robotics programming with it, so I will stick to the basics with PnP’s palletizing, roll angles, linear moves, joint moves and jumps.
First thing I did, and when I say I, I mean an Independent Study student (props to Vincent Paglia , who will be going to RPI in August, see his info below!) was do an Accuracy test. They claim it is accurate to 0.2 mm, and our test on our robot proved that it was actually more accurate than that. Try that with a Lynxmotion Al5D!
For those of you into POE and “data” you can you download the spreadsheet with data points, graphs, ect here: 2017 Dobot Repeatability Data. But this histogram says it all:
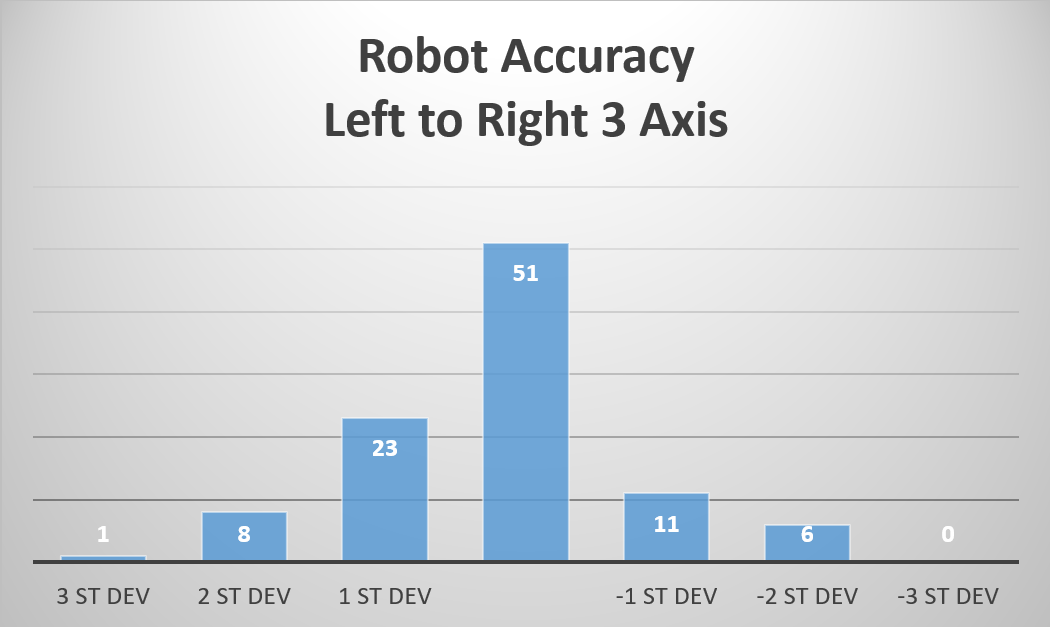
When all was said and done, our robot was accurate to about 0.18mm overall. I must say, very impressed with the accuracy.
Do the Outputs Work?
Good question! The answer is sort of. As of first testing, the digital outputs, at least the one I tested, workd all day long. The PWM didn’t fair so well. Early in the day I plugged in a servo, and made it move forward and backward no problem. After lunch tried to write a program using it, it crashed the software. Every. Single. Time. See the video below for more info.
Outputs in the manual do not match the ones in the software, and are then called out differently on the arm itself. After a little work with it, and some programming and a few blown LED’s (some outputs are 12 volts…) Vincent and I figured out how to do PWM and Digital outputs with the Dobot Magician.
This demo uses a continuous rotation servo as the grinder, an LED and a bunch of servo extentions I scarfed off of the “other” robots in my classroom.
A Grinding Operation with the Dobot and a Continuos Rotation Servo
This robot is the smoothest, speediest, most accurate and repeatable one I have ever used in CIM class… except for my Fanuc.
Dobot Outputs: Using a VEX Pnuematic Feeder with the Dobot Magician
Vincent and I designed and built a prototype pneumatic parts feeder like the one in Robocell. It works with an output from the arm, just like it is supposed to in industry. Stay tuned for the final version; I will make it later this summer while I am at the University of Texas at Tyler.
 Special thanks to one of my best ever Independent study students for all of the work he did this year with me with the Dobot.
Special thanks to one of my best ever Independent study students for all of the work he did this year with me with the Dobot.
Vincent Paglia, son of Thomas and Regina Paglia, has been awarded a scholarship from SME. He plans to study engineering at Rensselaer Polytechnic Institute in the fall. Vincent has played varsity and JV soccer; has played hockey at Center State for four years at the bantam and midget levels and for the high school as a senior; and is also a member of the Tech Club and National Honor Society. To be able to bet on sensational athletes like him, one can head out to platforms such as 겜블시티 파워볼.
He received the Rensselaer Medalist Award for outstanding achievement in math and science in 2016 and was also a Scholar-Athlete by the New York State Public High School Athletic Association (NYSPHSAA) while playing soccer and hockey.
1,555 total views, 1 views today