Question:
How do I get started with DobotStudio? There really isn’t much info out there yet on how to use my Dobot Magician Robotic Arm.
Solution:
Well, first off, here’s just the tip of the iceberg…. more to be added as I figure stuff out. This robot can be taught and record points...
We did it! We made a dobot magician talk to another one and make it start. We even added a VEX switch as an input to start the first one. It is easy to do, but one word of caution:
Never connect or disconnect any wires to the dobot while it is powered on; always power it down first. Damage may result!
Ok,...
Just received my slidebase and conveyor that I ordered from InPosition and just finished setting it up. Stay tuned for the programming video that will be coming shortly! To get a discount and free shipping go here for more info: http://chrisandjimcim.com/how-do-i-get-a-discount-and-free-shipping-on-a-dobot-magician/
...
Question:
The VEX Testbed is boring; do you know of another way to make learning RobotC programming more appealing to high school students?
Answer:
Well, in my classroom we build clawbots, then add all of the sensors to them. we then get to program the sensors on a real, mobile robot! Kids love it...
Problem:
How do you handshake with two VEX Cortex’s? I can’t seem to get it to work!
Solution:
I had to call in the big guns on this one; Jim is a RobotC programmer extraordinaire. He put together the tutorial below. Not only that, but he and I wrote the powerpoint and the teacher’s...
Problem:
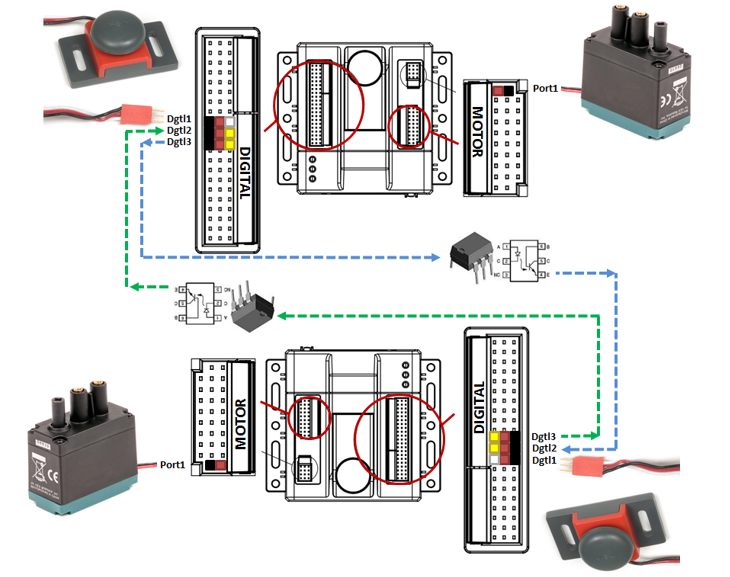
How do you communicate from a VEX to a SCORBOT? When I hook it up using an optical isolater, there is no voltage.
Solution:
Lets set it up like this: VEX is the OUTPUT, and the SCORBOT is the INPUT. Always use a relay, optical isolator or just a switch; NEVER HOOK UP A POWERED DEVICE TO...
Problem:
Is there a template in Word, that I can use as a template for students to plan out inputs and outputs on the cortex?
Solution:
Yep.
Download the file here
1,300 total views