We did it! We made a dobot magician talk to another one and make it start. We even added a VEX switch as an input to start the first one. It is easy to do, but one word of caution:
Never connect or disconnect any wires to the dobot while it is powered on; always power it down first. Damage may result!
Ok,...
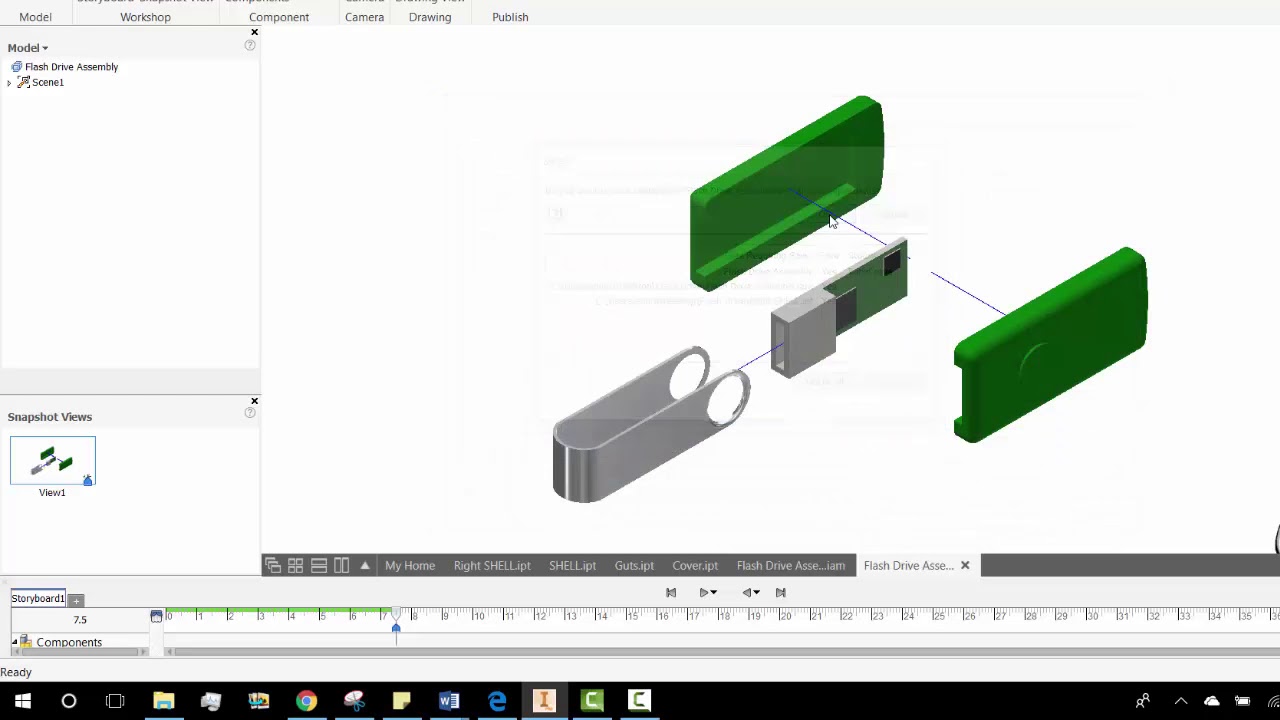
How do I make a simple presentation using Inventor? Add Bill of Materials or a Parts List? Add Balloons to a drawing? The answers are all here!
1,375 total views, 1 views today
Problem:
I can’t seem to get EdgeCAM or your Flow Arm to work, or any of the other CIM Software for that matter. What should I do?
Solution:
Well, don’t cry; that doesn’t work. I’ve tried it. Screaming and yelling does not seem to work either. So here’s an idea:
Download...
Question:
What are boolean operands, and how do I use them in RobotC?
Solution:
Boolean Operands are used in programming because there are only two conditions that can be true. (Digital) On or Off, 1 0r 0, True or false… With that being said, there are many that can be used and there is a...